Mini Mouse
In the past 12 months, I built Bot Matrix, aiming for PiWars 2018 (though unfortunately I wasn’t selected as a competitor). It was the first chassis I built from scratch, and I learnt a lot in the process! Bot Matrix was large (on the limits of the PiWars size allowance), and used pretty large motors and drivers.

This year’s project is a little bit different - I always fancied building a robot in a computer mouse and so that’s what I’m going for. Min(n)i(e) Mouse is different from Bot Matrix in nearly every way. Bot Matrix used a Pi 3, two dedicated microcontrollers for off-board processing, tracks, 5 ampere motors, tracks, and 3072 LEDs. By comparison, Mini Mouse will have a Pi Zero, only. All processing and control will be handled on-board by the Pi.
The selected sacrificial mouse is an IBM 06H4600 from 1994, though I think I will likely use a 3D-printed replica rather than butchering a piece of computing history.
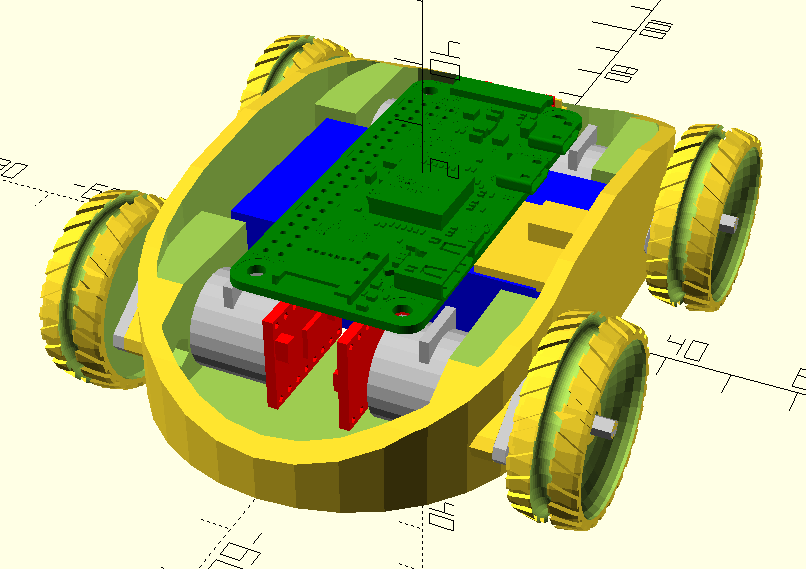
The whole system will consist of a Pi Zero W, a wide-angle micro camera, four stepper motors and drivers, a BNO055 IMU, a 3S LiPo, and a power supply.
Truth be told, this post has been written after a fair deal of the development has been done, so I’m pretty confident about the eventual design at this point.